Reka Responsible AI, Model Risk, Ethics & Governance Framework
Reka Edge
Frontier–level visual intelligence. Optimized for deployment. Engineered for Speed.
Reka Edge
Leading Performance
across multimodal benchmarks
2.4x
2.4× faster on average across requests
Easy Deployment
Hugging Face • vLLM
Open Source
Weights available on Hugging Face
[Reka Edge]
Reka Edge is the fastest vision language model in the 7B - 8B class designed for real world systems. Our model process videos and images with fewer tokens, which translates to concrete reductions in latency and memory footprint.
Perfect for Edge Deployment
" width="20px"><path d="M 0 16.667 L 0 0 L 20 0 L 20 16.667 Z" fill="transparent" height="16.666666666666668px" id="T6SBm_D0d" width="20px"/><path d="M 0.39 3.344 C 0.237 3.436 0.045 3.327 0.041 3.149 L 0 0.235 C -0.002 0.057 0.188 -0.058 0.343 0.03 L 2.878 1.452 C 3.033 1.538 3.037 1.761 2.884 1.853 L 0.39 3.346 Z" fill="transparent" height="3.3775141277927228px" id="ReKAlKksz" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1.11" stroke="rgb(255, 255, 255)" transform="translate(7.234 4.497)" width="2.9967071507078096px"/><path d="M 7.202 4.525 C 7.318 4.039 7.34 3.52 7.242 2.987 C 6.926 1.288 5.441 0.029 3.721 0.001 C 1.598 -0.037 -0.086 1.726 0.003 3.824 C 0.089 5.847 1.792 7.419 3.807 7.333 C 4.57 7.301 5.27 7.035 5.839 6.606 C 6.335 6.233 7.012 6.227 7.505 6.602 L 9.575 8.378" fill="transparent" height="8.377920846066822px" id="miZd3xdJy" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1.11" stroke="rgb(255, 255, 255)" transform="translate(10.117 7.847)" width="9.575301191080364px"/><path d="M 15.388 6.356 L 15.388 1.16 C 15.388 0.519 14.872 0 14.234 0 L 4.421 0 L 1.183 0 C 0.545 0 0.028 0.519 0.028 1.16 L 0.028 2.945 L 0 6.826 L 0 10.082 C 0 10.723 0.517 11.242 1.155 11.242 L 7.751 11.242" fill="transparent" height="11.241599999999998px" id="gBJ2d9zBz" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1.11" stroke="rgb(255, 255, 255)" transform="translate(0.457 0.569)" width="15.388469999999993px"/></g></svg>)
" width="20.005591388355608px"><path d="M 0 13.636 L 0 0 L 20 0 L 20 13.636 Z" fill="transparent" height="13.636363636363637px" id="D7aUW1Dsc" width="20px"/><path d="M 2.06 3.385 L 0 3.385 L 0 1.026 C 0 0.459 0.461 0 1.03 0 C 1.599 0 2.06 0.459 2.06 1.026 Z" fill="transparent" height="3.3854090909090893px" id="eqaH1hRdj" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(1.3 4.858)" width="2.0595090909090947px"/><path d="M 0 1.286 L 0 0" fill="transparent" height="1.2864954545454532px" id="plQWDEjmz" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(2.33 3.571)" width="1px"/><path d="M 0 0 L 4.658 0" fill="transparent" height="1px" id="hfaugc1tw" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(0 3.794)" width="4.658136363636357px"/><path d="M 2.059 3.385 L 0 3.385 L 0 1.026 C 0 0.459 0.461 0 1.03 0 C 1.599 0 2.059 0.459 2.059 1.026 Z" fill="transparent" height="3.3854090909090893px" id="q_EeeHfk0" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(16.648 4.858)" width="2.0595px"/><path d="M 0 1.286 L 0 0" fill="transparent" height="1.2864954545454532px" id="StBsrec8r" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(17.677 3.571)" width="1px"/><path d="M 0 0 L 4.658 0" fill="transparent" height="1px" id="I0M1w7z2c" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(15.347 3.794)" width="4.65813636363637px"/><path d="M 13.288 0 L 0 0 L 0 1.541 L 13.288 1.541 Z" fill="transparent" height="1.5411818181818182px" id="YVjrFsW56" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(3.36 6.042)" width="13.287927272727273px"/><path d="M 6.227 0 L 0 0 L 0 1.71 L 6.227 1.71 Z" fill="transparent" height="1.7103636363636348px" id="pv7RhKUqE" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(6.889 8.728)" width="6.227045454545454px"/><path d="M 1.061 0 L 5.166 0 C 5.751 0 6.227 0.474 6.227 1.058 L 6.227 1.184 L 0 1.184 L 0 1.058 C 0 0.474 0.476 0 1.061 0 Z" fill="transparent" height="1.1842181818181823px" id="PQbiOkc6N" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(6.889 3.713)" width="6.227045454545454px"/><path d="M 3.188 0 L 0 0 L 0 0.073 C 0 0.95 0.713 1.66 1.593 1.66 C 2.474 1.66 3.186 0.95 3.186 0.073 L 3.186 0 Z" fill="transparent" height="1.6601818181818189px" id="LaGqm6yq3" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(8.408 10.439)" width="3.1881363636363673px"/><path d="M 1.349 0 C 1.349 0 0 0.879 0 2.822" fill="transparent" height="2.8220909090909103px" id="F3bWqe1ud" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(5.54 10.439)" width="1.3487272727272686px"/><path d="M 0 0 L 1.14 0" fill="transparent" height="1px" id="kEw864hfG" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(4.953 13.261)" width="1.13981818181818px"/><path d="M 0 0 C 0 0 1.349 0.879 1.349 2.822" fill="transparent" height="2.8220909090909103px" id="kyAKKQppq" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(13.116 10.439)" width="1.3487272727272686px"/><path d="M 1.142 0 L 0 0" fill="transparent" height="1px" id="n_GqjdSHU" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(13.913 13.261)" width="1.141681818181814px"/><path d="M 1.925 0.461 C 1.698 0.18 1.353 0 0.963 0 C 0.573 0 0.226 0.18 0 0.461" fill="transparent" height="1px" id="ZFdn66v4u" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(9.042 1.932)" width="1.9251818181818177px"/><path d="M 4.197 1.002 C 3.703 0.39 2.947 0 2.099 0 C 1.25 0 0.494 0.39 0 1.002" fill="transparent" height="1.0020454545454545px" id="LFb4mFtne" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="0.68" stroke="rgb(255, 255, 255)" transform="translate(7.904 0.48)" width="4.197363636363631px"/></g></svg>)
" width="20px"><path d="M 0 15 L 0 0 L 20 0 L 20 15 Z" fill="transparent" height="15px" id="XOcpGfEC4" width="20px"/><path d="M 2.632 14.079 L 1.317 14.079 C 0.59 14.079 0 13.495 0 12.775 L 0 1.303 C 0 0.583 0.59 0 1.317 0 L 17.651 0 C 18.379 0 18.968 0.583 18.968 1.303 L 18.968 12.332 C 18.968 13.298 18.177 14.079 17.204 14.079 L 4.742 14.079" fill="transparent" height="14.0787465px" id="H1gCgEfX5" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1" stroke="rgb(255, 255, 255)" transform="translate(0.56 0.484)" width="18.968360000000004px"/><path d="M 0 0 L 15.019 0" fill="transparent" height="1px" id="XiA4Evs9v" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1" stroke="rgb(255, 255, 255)" transform="translate(2.556 11.956)" width="15.019115px"/><path d="M 0 0 L 0 2.16" fill="transparent" height="2.16px" id="JGZv1rPIA" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1" stroke="rgb(255, 255, 255)" transform="translate(16.368 10.876)" width="1px"/><path d="M 1.873 5.564 L 4.58 5.564 C 5.154 5.564 5.621 5.103 5.621 4.534 L 5.621 4.174 L 6.742 4.728 C 7.087 4.9 7.496 4.65 7.496 4.266 L 7.496 1.298 C 7.496 0.916 7.089 0.666 6.742 0.836 L 5.621 1.39 L 5.621 1.03 C 5.621 0.462 5.154 0 4.58 0 L 1.041 0 C 0.466 0 0 0.462 0 1.03 L 0 5.734" fill="transparent" height="5.73415px" id="rhoe_HpRS" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1" stroke="rgb(255, 255, 255)" transform="translate(6.796 3.393)" width="7.495599999999996px"/></g></svg>)
" width="19.975589743589747px"><path d="M 0 15.385 L 0 0 L 19.976 0 L 19.976 15.385 Z" fill="transparent" height="15.384615384615383px" id="PKC_ZacQq" width="19.975589743589747px"/><path d="M 0 0 L 3.82 0 C 4.334 0 4.751 0.417 4.751 0.932 L 4.751 4.714 L 0 4.714 Z" fill="transparent" height="4.713948717948718px" id="mSRfQAXcB" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1.03" stroke="rgb(255, 255, 255)" transform="translate(9.937 0.395)" width="4.751230769230775px"/><path d="M 0 0 L 4.751 0 L 4.751 4.714 L 0.932 4.714 C 0.417 4.714 0 4.297 0 3.782 Z" fill="transparent" height="4.713948717948718px" id="Zh8rtT1JH" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1.03" stroke="rgb(255, 255, 255)" transform="translate(5.187 9.933)" width="4.751230769230775px"/><path d="M 5.031 0 L 6.11 0 C 6.68 0 7.142 0.462 7.142 1.032 L 7.142 8.468 C 7.142 9.039 6.68 9.501 6.11 9.501 L 0 9.501" fill="transparent" height="9.500564102564102px" id="fRR1YAH1E" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1.03" stroke="rgb(255, 255, 255)" transform="translate(12.295 5.146)" width="7.141743589743589px"/><path d="M 0 9.501 L 0 0 L 7.39 0" fill="transparent" height="9.500564102564102px" id="eFrjd7OXh" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1.03" stroke="rgb(255, 255, 255)" transform="translate(9.937 5.146)" width="7.389538461538468px"/><path d="M 9.501 9.501 L 1.032 9.501 C 0.462 9.501 0 9.039 0 8.468 L 0 1.032 C 0 0.462 0.462 0 1.032 0 L 7.447 0" fill="transparent" height="9.500553846153846px" id="jNVqsy6X6" stroke-dasharray="" stroke-linecap="butt" stroke-linejoin="miter" stroke-miterlimit="10" stroke-width="1.03" stroke="rgb(255, 255, 255)" transform="translate(0.436 0.395)" width="9.500542564102567px"/></g></svg>)
Reka Edge achieves up to 2.4× lower latency on single requests.
Perfect for Edge Deployment

Reka Edge 2 is built on
660M parameter ConvNeXT V2 vision encoder for efficient visual processing
6B parameter language backbone for reasoning and generation
7B total parameters for both high-end performance and resource efficiency
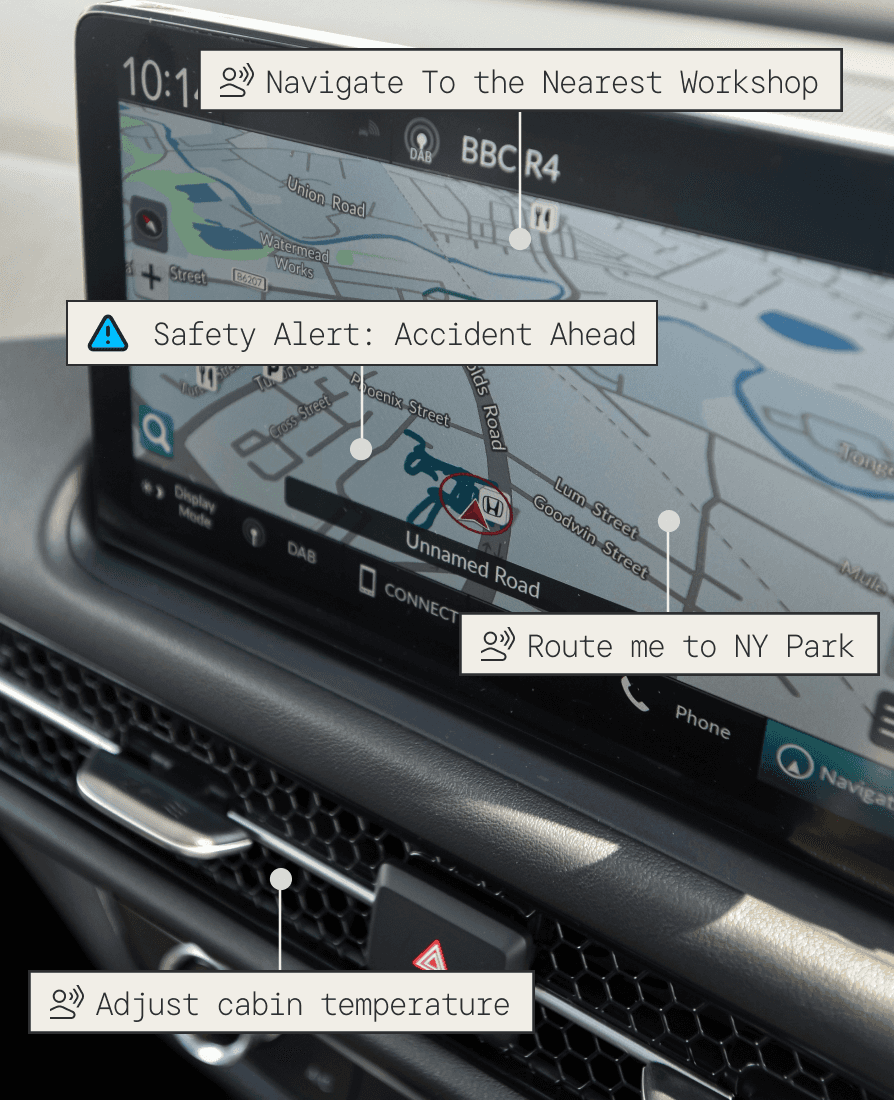
Reka Edge powers the next generation of Physical AI. Reka Edge is designed for production environments where speed and reliability matter, from robotics. to real-time surveillance, and agentic systems.
Perfect for Edge Deployment

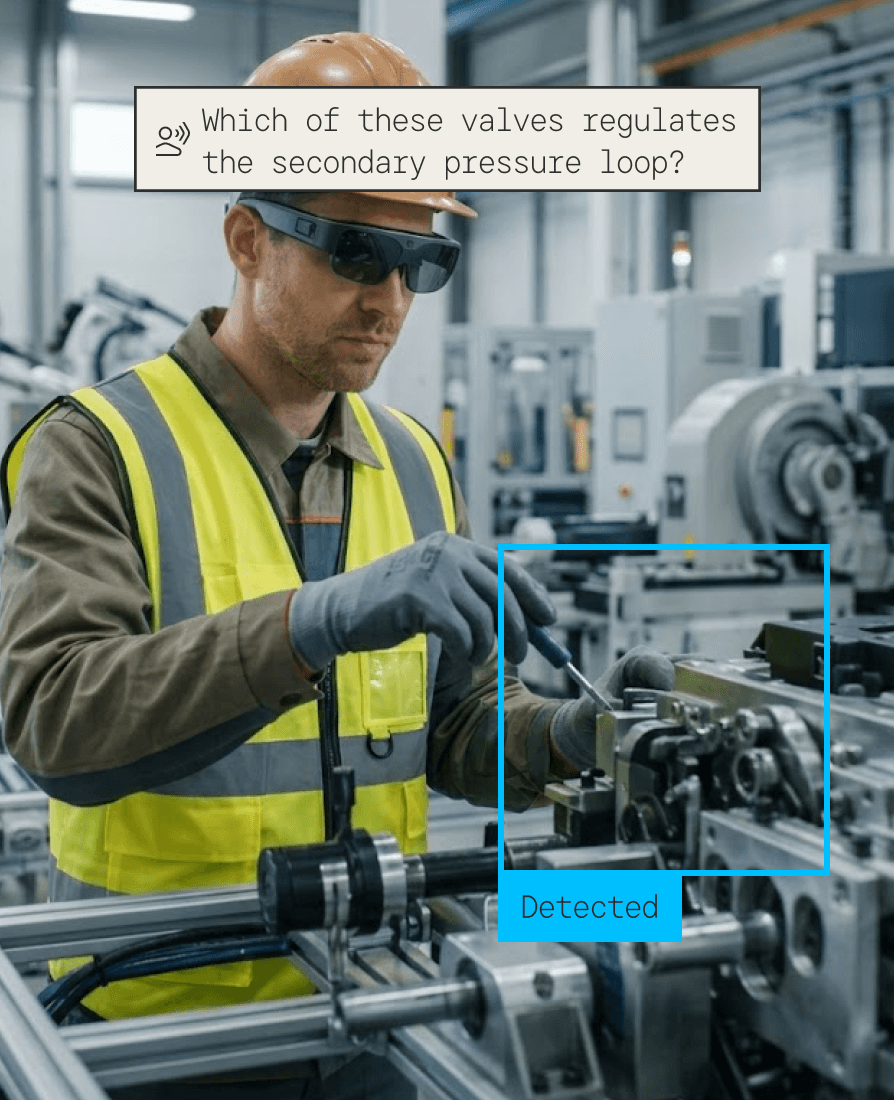
Problem
Physical AI requires fluid, continuous interaction with the unstructured world. Robots cannot wait seconds for a cloud VLM to tell them how to grasp an unfamiliar object. They need exact spatial coordinates and sub-second latency for control without awkward, dangerous stutters in movement or costly custom detector stacks.
Solution
Continuous Edge Perception: The robot's stereo cameras stream high frame rate visual data directly to internal edge compute (e.g., NVIDIA Jetson).
Contextual Encoding (Reka Edge): The ConvNeXT V2 backbone ingests the video. Highly efficient processing prevents the robot's onboard memory from overflowing during continuous operation.
Grounded Tool Localization: The model maps the environment, extracting precise bounding boxes for tools, target objects, and obstacles using conversational pointing (e.g., "Where is the 10mm wrench?").
Agentic Motor Control: Using its tool-use framework, the VLM actively orchestrates the robot's hardware APIs (e.g., adjust_grip_pressure(), move_arm_to(x,y,z)) to complete complex, multi-step tasks.

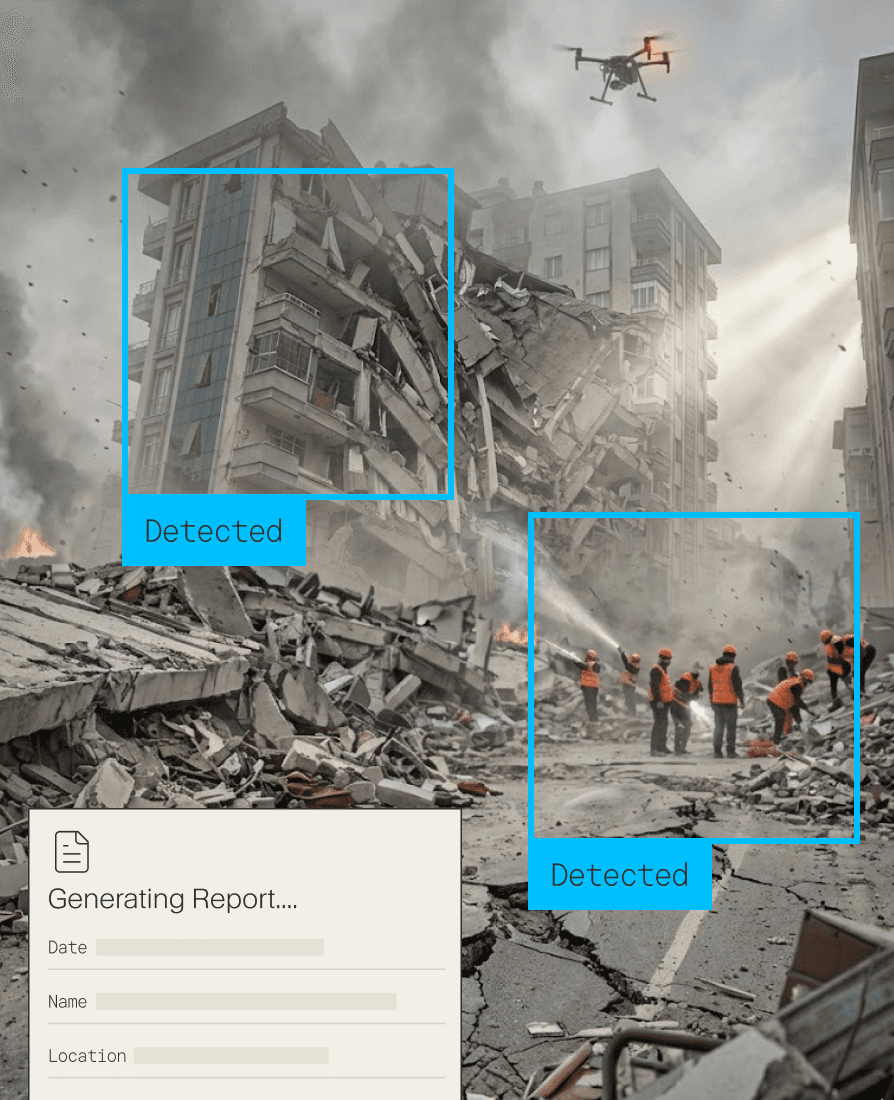
Problem
During search-and-rescue or reconnaissance operations, operators live in chaotic environments often completely devoid of cellular connectivity. Drones streaming HD footage back to a command center introduces lag and risks connection drops, while manual review of footage wastes precious, life-saving time.
Solution
Aerial Perception: Drones equipped with high-resolution optical and thermal cameras survey a disaster zone.
Token-Efficient Scanning: Reka Edge runs locally on the drone's onboard compute, continuously scanning the feed without being overwhelmed by the massive amount of visual data.
Anomaly & Human Detection: The model reasons over the chaotic visual data to distinguish between debris, wildlife, and human survivors, or identifies the visual signatures of a developing fire.
Autonomous Alerting: The VLM instantly logs the exact GPS coordinates and invokes flight control APIs to hover over the target, dropping a pin for ground teams.
